隨著技術(shù)的飛速發(fā)展,人工智能(AI)已成為自動駕駛開發(fā)的核心驅(qū)動力。它不僅重塑了車輛感知世界的方式,更在應(yīng)用軟件開發(fā)層面,催生了一場深刻的變革。本文將探討人工智能在自動駕駛軟件開發(fā)中的關(guān)鍵應(yīng)用領(lǐng)域。
一、 環(huán)境感知:車輛的“眼睛”與“大腦”
自動駕駛的首要任務(wù)是理解周圍環(huán)境。傳統(tǒng)計算機視覺方法在復(fù)雜、動態(tài)的場景中捉襟見肘,而基于深度學(xué)習(xí)的人工智能模型在此大放異彩。
- 目標(biāo)檢測與識別:卷積神經(jīng)網(wǎng)絡(luò)(CNN)等模型能夠?qū)崟r、高精度地識別車輛、行人、交通標(biāo)志、車道線等關(guān)鍵目標(biāo),其性能遠(yuǎn)超基于規(guī)則的傳統(tǒng)算法。
- 語義分割:為圖像中的每一個像素分配類別標(biāo)簽,精確理解道路結(jié)構(gòu)、可行駛區(qū)域及障礙物邊界,為路徑規(guī)劃提供精細(xì)化的地圖信息。
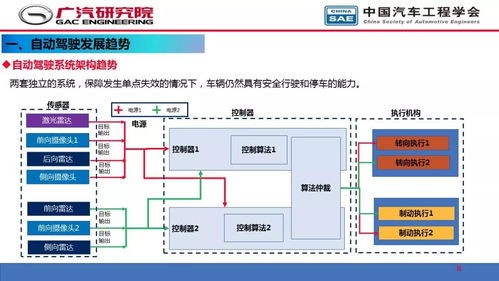
- 多傳感器融合:AI算法(如卡爾曼濾波的神經(jīng)網(wǎng)絡(luò)變體)能夠高效融合攝像頭、激光雷達(dá)(LiDAR)、毫米波雷達(dá)和超聲波傳感器的數(shù)據(jù),構(gòu)建統(tǒng)一、魯棒的環(huán)境模型,彌補單一傳感器的局限性。
二、 決策與規(guī)劃:車輛的“智慧中樞”
在精準(zhǔn)感知的基礎(chǔ)上,車輛需要像人類司機一樣做出智能決策。這主要依賴于強化學(xué)習(xí)和預(yù)測模型。
- 行為預(yù)測:通過循環(huán)神經(jīng)網(wǎng)絡(luò)(RNN)或圖神經(jīng)網(wǎng)絡(luò)(GNN),AI可以預(yù)測其他交通參與者(車輛、行人)的未來軌跡和意圖,這是實現(xiàn)安全、擬人化駕駛的關(guān)鍵。
- 路徑與運動規(guī)劃:結(jié)合高精地圖和實時感知數(shù)據(jù),AI規(guī)劃算法(如基于搜索、采樣或優(yōu)化的方法)能計算出安全、舒適、高效的最優(yōu)行駛軌跡,并實時應(yīng)對突發(fā)狀況。
- 決策制定:在復(fù)雜的交互場景(如無保護左轉(zhuǎn)、并入高速車流)中,基于深度強化學(xué)習(xí)的模型可以通過與仿真環(huán)境的巨量交互,學(xué)習(xí)到接近最優(yōu)的駕駛策略。
三、 控制執(zhí)行:精準(zhǔn)的“手腳”配合
規(guī)劃好的軌跡需要被精準(zhǔn)執(zhí)行。AI,特別是模型預(yù)測控制(MPC)與神經(jīng)網(wǎng)絡(luò)結(jié)合的方法,能夠?qū)崿F(xiàn)對油門、剎車和轉(zhuǎn)向的平滑、自適應(yīng)控制,確保車輛嚴(yán)格跟隨規(guī)劃路徑,同時兼顧乘坐舒適性和能耗。
四、 仿真與測試:AI驅(qū)動的開發(fā)加速器
自動駕駛系統(tǒng)的訓(xùn)練與驗證嚴(yán)重依賴海量數(shù)據(jù)。AI在此環(huán)節(jié)的應(yīng)用至關(guān)重要:
- 仿真環(huán)境生成:利用生成對抗網(wǎng)絡(luò)(GAN)等技術(shù),可以創(chuàng)造出大量逼真、多樣化的極端 Corner Case 場景,用于訓(xùn)練和測試算法的魯棒性,大幅降低實車測試的成本與風(fēng)險。
- 數(shù)據(jù)閉環(huán)與迭代:AI軟件能夠自動分析實車路測數(shù)據(jù),識別系統(tǒng)短板,并自動生成針對性的仿真測試用例或重新標(biāo)注訓(xùn)練數(shù)據(jù),驅(qū)動算法模型持續(xù)迭代優(yōu)化,形成高效的開發(fā)閉環(huán)。
五、 人工智能應(yīng)用軟件開發(fā)的關(guān)鍵趨勢
在軟件開發(fā)層面,呈現(xiàn)以下趨勢:
- 端到端學(xué)習(xí):探索從原始傳感器數(shù)據(jù)直接輸出控制指令的端到端神經(jīng)網(wǎng)絡(luò)模型,簡化傳統(tǒng)流水線式的復(fù)雜系統(tǒng)架構(gòu)。
- 軟件2.0與數(shù)據(jù)驅(qū)動:開發(fā)范式從“編寫明確邏輯”的軟件1.0,轉(zhuǎn)向“定義網(wǎng)絡(luò)結(jié)構(gòu)并提供數(shù)據(jù)”的軟件2.0模式,數(shù)據(jù)(特別是高質(zhì)量標(biāo)注數(shù)據(jù))成為核心資產(chǎn)。
- 邊緣計算與模型優(yōu)化:為了滿足車載嵌入式平臺的實時性、功耗和算力約束,模型壓縮(如剪枝、量化)、知識蒸餾和專用AI芯片(如NPU)的軟件開發(fā)與適配成為關(guān)鍵技術(shù)。
- 安全與可解釋性:隨著AI模型復(fù)雜度增加,確保其決策安全、可靠且可解釋(XAI)的軟件開發(fā)框架和測試標(biāo)準(zhǔn)日益受到重視。
****
人工智能已深度滲透到自動駕駛軟件開發(fā)的每一個環(huán)節(jié),從感知、決策到控制,乃至整個開發(fā)測試流程。它不僅是實現(xiàn)全自動駕駛夢想的技術(shù)基石,更正在引領(lǐng)汽車工業(yè)向智能化、軟件定義的方向深刻轉(zhuǎn)型。未來的競爭,將很大程度上是人工智能算法創(chuàng)新與高效軟件開發(fā)能力的競爭。